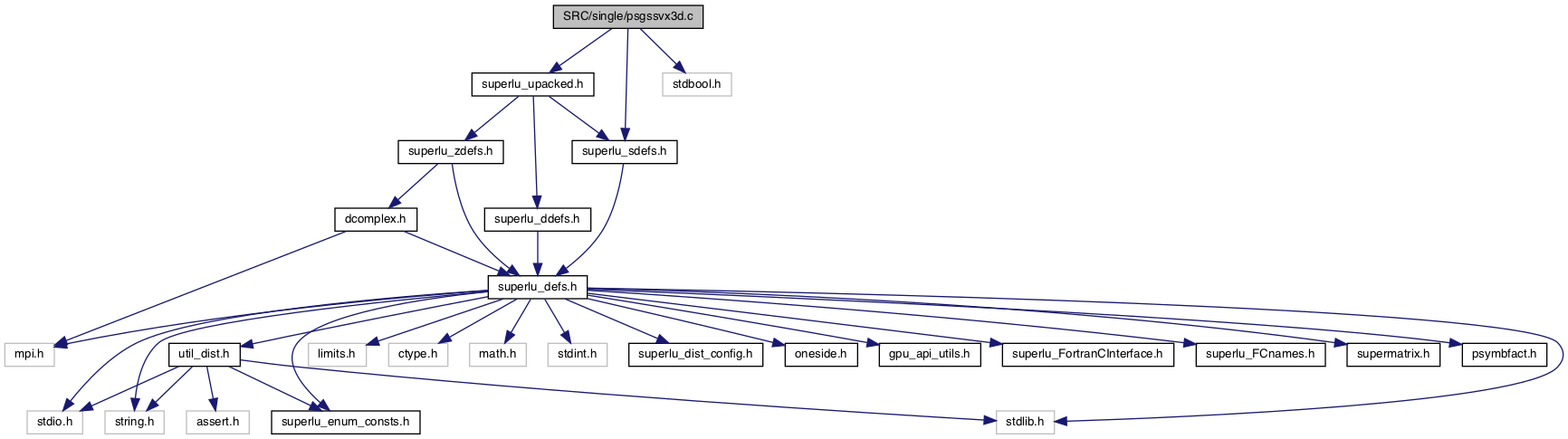
Solves a system of linear equations A*X=B using 3D process grid. More...
Include dependency graph for psgssvx3d.c:
Macros | |
| #define | EPSILON 1e-3 |
Functions | |
| int | swriteLUtoDisk (int nsupers, int_t *xsup, sLUstruct_t *LUstruct) |
| static int | scheckArr (float *A, float *B, int n) |
| int | scheckLUFromDisk (int nsupers, int_t *xsup, sLUstruct_t *LUstruct) |
| void | sDumpLblocks3D (int_t nsupers, gridinfo3d_t *grid3d, Glu_persist_t *Glu_persist, sLocalLU_t *Llu) |
| Dump the factored matrix L using matlab triple-let format. More... | |
| void | psgssvx3d (superlu_dist_options_t *options, SuperMatrix *A, sScalePermstruct_t *ScalePermstruct, float B[], int ldb, int nrhs, gridinfo3d_t *grid3d, sLUstruct_t *LUstruct, sSOLVEstruct_t *SOLVEstruct, float *berr, SuperLUStat_t *stat, int *info) |
Detailed Description
Solves a system of linear equations A*X=B using 3D process grid.
Copyright (c) 2003, The Regents of the University of California, through Lawrence Berkeley National Laboratory (subject to receipt of any required approvals from U.S. Dept. of Energy)
All rights reserved.
The source code is distributed under BSD license, see the file License.txt at the top-level directory.
-- Distributed SuperLU routine (version 9.0) -- Lawrence Berkeley National Lab, Georgia Institute of Technology, Oak Ridge National Lab May 12, 2021 October 5, 2021 Last update: November 8, 2021 v7.2.0 */ //#include "TRF3dV100/superlu_summit.h" // #include "psdistribute3d.h" // #include "sssvx3dAux.c" // int_t sgatherAllFactoredLU3d( strf3Dpartition_t* trf3Dpartition, // sLUstruct_t* LUstruct, gridinfo3d_t* grid3d, SCT_t* SCT ); /*!Purpose ======= PSGSSVX3D solves a system of linear equations A*X=B, by using Gaussian elimination with "static pivoting" to compute the LU factorization of A. Static pivoting is a technique that combines the numerical stability of partial pivoting with the scalability of Cholesky (no pivoting), to run accurately and efficiently on large numbers of processors. See our paper at http://www.nersc.gov/~xiaoye/SuperLU/ for a detailed description of the parallel algorithms. The input matrices A and B are distributed by block rows. Here is a graphical illustration (0-based indexing): A B 0 --------------- ------ | | | | | | P0 | | | | | | --------------- ------
- fst_row->| | | | | | | | | m_loc | | P1 | | | | | | |
- | | | | --------------- ------ | . | |. | | . | |. | | . | |. | --------------- ------ where, fst_row is the row number of the first row, m_loc is the number of rows local to this processor These are defined in the 'SuperMatrix' structure, see supermatrix.h. Here are the options for using this code: 1. Independent of all the other options specified below, the user must supply - B, the matrix of right-hand sides, distributed by block rows, and its dimensions ldb (local) and nrhs (global)
grid, a structure describing the 2D processor mesh
- options->IterRefine, which determines whether or not to improve the accuracy of the computed solution using iterative refinement On output, B is overwritten with the solution X. 2. Depending on options->Fact, the user has four options for solving A*X=B. The standard option is for factoring A "from scratch". (The other options, described below, are used when A is sufficiently similar to a previously solved problem to save time by reusing part or all of the previous factorization.) - options->Fact = DOFACT: A is factored "from scratch" In this case the user must also supply o A, the input matrix as well as the following options to determine what matrix to factorize. o options->Equil, to specify how to scale the rows and columns of A to "equilibrate" it (to try to reduce its condition number and so improve the accuracy of the computed solution) o options->RowPerm, to specify how to permute the rows of A (typically to control numerical stability) o options->ColPerm, to specify how to permute the columns of A (typically to control fill-in and enhance parallelism during factorization) o options->ReplaceTinyPivot, to specify how to deal with tiny pivots encountered during factorization (to control numerical stability) The outputs returned include o ScalePermstruct, modified to describe how the input matrix A was equilibrated and permuted: . ScalePermstruct->DiagScale, indicates whether the rows and/or columns of A were scaled . ScalePermstruct->R, array of row scale factors . ScalePermstruct->C, array of column scale factors . ScalePermstruct->perm_r, row permutation vector . ScalePermstruct->perm_c, column permutation vector (part of ScalePermstruct may also need to be supplied on input, depending on options->RowPerm and options->ColPerm as described later). o A, the input matrix A overwritten by the scaled and permuted matrix diag(R)*A*diag(C)*Pc^T, where Pc is the row permutation matrix determined by ScalePermstruct->perm_c diag(R) and diag(C) are diagonal scaling matrices determined by ScalePermstruct->DiagScale, ScalePermstruct->R and ScalePermstruct->C o LUstruct, which contains the L and U factorization of A1 where A1 = Pc*Pr*diag(R)*A*diag(C)*Pc^T = L*U (Note that A1 = Pc*Pr*Aout, where Aout is the matrix stored in A on output.) 3. The second value of options->Fact assumes that a matrix with the same sparsity pattern as A has already been factored: - options->Fact = SamePattern: A is factored, assuming that it has the same nonzero pattern as a previously factored matrix. In this case the algorithm saves time by reusing the previously computed column permutation vector stored in ScalePermstruct->perm_c and the "elimination tree" of A stored in LUstruct->etree In this case the user must still specify the following options as before: o options->Equil o options->RowPerm o options->ReplaceTinyPivot but not options->ColPerm, whose value is ignored. This is because the previous column permutation from ScalePermstruct->perm_c is used as input. The user must also supply o A, the input matrix o ScalePermstruct->perm_c, the column permutation o LUstruct->etree, the elimination tree The outputs returned include o A, the input matrix A overwritten by the scaled and permuted matrix as described above o ScalePermstruct, modified to describe how the input matrix A was equilibrated and row permuted o LUstruct, modified to contain the new L and U factors 4. The third value of options->Fact assumes that a matrix B with the same sparsity pattern as A has already been factored, and where the row permutation of B can be reused for A. This is useful when A and B have similar numerical values, so that the same row permutation will make both factorizations numerically stable. This lets us reuse all of the previously computed structure of L and U. - options->Fact = SamePattern_SameRowPerm: A is factored, assuming not only the same nonzero pattern as the previously factored matrix B, but reusing B's row permutation. In this case the user must still specify the following options as before: o options->Equil o options->ReplaceTinyPivot but not options->RowPerm or options->ColPerm, whose values are ignored. This is because the permutations from ScalePermstruct->perm_r and ScalePermstruct->perm_c are used as input. The user must also supply o A, the input matrix o ScalePermstruct->DiagScale, how the previous matrix was row and/or column scaled o ScalePermstruct->R, the row scalings of the previous matrix, if any o ScalePermstruct->C, the columns scalings of the previous matrix, if any o ScalePermstruct->perm_r, the row permutation of the previous matrix o ScalePermstruct->perm_c, the column permutation of the previous matrix o all of LUstruct, the previously computed information about L and U (the actual numerical values of L and U stored in LUstruct->Llu are ignored) The outputs returned include o A, the input matrix A overwritten by the scaled and permuted matrix as described above o ScalePermstruct, modified to describe how the input matrix A was equilibrated (thus ScalePermstruct->DiagScale, R and C may be modified) o LUstruct, modified to contain the new L and U factors 5. The fourth and last value of options->Fact assumes that A is identical to a matrix that has already been factored on a previous call, and reuses its entire LU factorization - options->Fact = Factored: A is identical to a previously factorized matrix, so the entire previous factorization can be reused. In this case all the other options mentioned above are ignored (options->Equil, options->RowPerm, options->ColPerm, options->ReplaceTinyPivot) The user must also supply o A, the unfactored matrix, only in the case that iterative refinment is to be done (specifically A must be the output A from the previous call, so that it has been scaled and permuted) o all of ScalePermstruct o all of LUstruct, including the actual numerical values of L and U all of which are unmodified on output. Arguments ========= options (input) superlu_dist_options_t* (global) The structure defines the input parameters to control how the LU decomposition will be performed. The following fields should be defined for this structure: o Fact (fact_t) Specifies whether or not the factored form of the matrix A is supplied on entry, and if not, how the matrix A should be factorized based on the previous history. = DOFACT: The matrix A will be factorized from scratch. Inputs: A options->Equil, RowPerm, ColPerm, ReplaceTinyPivot Outputs: modified A (possibly row and/or column scaled and/or permuted) all of ScalePermstruct all of LUstruct = SamePattern: the matrix A will be factorized assuming that a factorization of a matrix with the same sparsity pattern was performed prior to this one. Therefore, this factorization will reuse column permutation vector ScalePermstruct->perm_c and the elimination tree LUstruct->etree Inputs: A options->Equil, RowPerm, ReplaceTinyPivot ScalePermstruct->perm_c LUstruct->etree Outputs: modified A (possibly row and/or column scaled and/or permuted) rest of ScalePermstruct (DiagScale, R, C, perm_r) rest of LUstruct (GLU_persist, Llu) = SamePattern_SameRowPerm: the matrix A will be factorized assuming that a factorization of a matrix with the same sparsity pattern and similar numerical values was performed prior to this one. Therefore, this factorization will reuse both row and column scaling factors R and C, and the both row and column permutation vectors perm_r and perm_c, distributed data structure set up from the previous symbolic factorization. Inputs: A options->Equil, ReplaceTinyPivot all of ScalePermstruct all of LUstruct Outputs: modified A (possibly row and/or column scaled and/or permuted) modified LUstruct->Llu = FACTORED: the matrix A is already factored. Inputs: all of ScalePermstruct all of LUstruct o Equil (yes_no_t) Specifies whether to equilibrate the system. = NO: no equilibration. = YES: scaling factors are computed to equilibrate the system: diag(R)*A*diag(C)*inv(diag(C))*X = diag(R)*B. Whether or not the system will be equilibrated depends on the scaling of the matrix A, but if equilibration is used, A is overwritten by diag(R)*A*diag(C) and B by diag(R)*B. o RowPerm (rowperm_t) Specifies how to permute rows of the matrix A. = NATURAL: use the natural ordering. = LargeDiag_MC64: use the Duff/Koster algorithm to permute rows of the original matrix to make the diagonal large relative to the off-diagonal. = LargeDiag_HPWM: use the parallel approximate-weight perfect matching to permute rows of the original matrix to make the diagonal large relative to the off-diagonal. = MY_PERMR: use the ordering given in ScalePermstruct->perm_r input by the user. o ColPerm (colperm_t) Specifies what type of column permutation to use to reduce fill. = NATURAL: natural ordering. = MMD_AT_PLUS_A: minimum degree ordering on structure of A'+A. = MMD_ATA: minimum degree ordering on structure of A'*A. = MY_PERMC: the ordering given in ScalePermstruct->perm_c. o ReplaceTinyPivot (yes_no_t) = NO: do not modify pivots = YES: replace tiny pivots by sqrt(epsilon)*norm(A) during LU factorization. o IterRefine (IterRefine_t) Specifies how to perform iterative refinement. = NO: no iterative refinement. = SLU_DOUBLE: accumulate residual in double precision. = SLU_EXTRA: accumulate residual in extra precision. NOTE: all options must be indentical on all processes when calling this routine. A (input) SuperMatrix* (local); A resides on all 3D processes. On entry, matrix A in A*X=B, of dimension (A->nrow, A->ncol). The number of linear equations is A->nrow. The type of A must be: Stype = SLU_NR_loc; Dtype = SLU_S; Mtype = SLU_GE. That is, A is stored in distributed compressed row format. See supermatrix.h for the definition of 'SuperMatrix'. This routine only handles square A, however, the LU factorization routine PSGSTRF can factorize rectangular matrices. Internally, A is gathered on 2D processs grid-0, call it A2d. On exit, A2d may be overwtirren by diag(R)*A*diag(C)*Pc^T, depending on ScalePermstruct->DiagScale and options->ColPerm: if ScalePermstruct->DiagScale != NOEQUIL, A2d is overwritten by diag(R)*A*diag(C). if options->ColPerm != NATURAL, A2d is further overwritten by diag(R)*A*diag(C)*Pc^T. If all the above condition are true, the LU decomposition is performed on the matrix Pc*Pr*diag(R)*A*diag(C)*Pc^T. ScalePermstruct (input/output) sScalePermstruct_t* (global) The data structure to store the scaling and permutation vectors describing the transformations performed to the matrix A. It contains the following fields: o DiagScale (DiagScale_t) Specifies the form of equilibration that was done. = NOEQUIL: no equilibration. = ROW: row equilibration, i.e., A was premultiplied by diag(R). = COL: Column equilibration, i.e., A was postmultiplied by diag(C). = BOTH: both row and column equilibration, i.e., A was replaced by diag(R)*A*diag(C). If options->Fact = FACTORED or SamePattern_SameRowPerm, DiagScale is an input argument; otherwise it is an output argument. o perm_r (int*) Row permutation vector, which defines the permutation matrix Pr; perm_r[i] = j means row i of A is in position j in Pr*A. If options->RowPerm = MY_PERMR, or options->Fact = SamePattern_SameRowPerm, perm_r is an input argument; otherwise it is an output argument. o perm_c (int*) Column permutation vector, which defines the permutation matrix Pc; perm_c[i] = j means column i of A is in position j in A*Pc. If options->ColPerm = MY_PERMC or options->Fact = SamePattern or options->Fact = SamePattern_SameRowPerm, perm_c is an input argument; otherwise, it is an output argument. On exit, perm_c may be overwritten by the product of the input perm_c and a permutation that postorders the elimination tree of Pc*A'*A*Pc'; perm_c is not changed if the elimination tree is already in postorder. o R (float *) dimension (A->nrow) The row scale factors for A. If DiagScale = ROW or BOTH, A is multiplied on the left by diag(R). If DiagScale = NOEQUIL or COL, R is not defined. If options->Fact = FACTORED or SamePattern_SameRowPerm, R is an input argument; otherwise, R is an output argument. o C (float *) dimension (A->ncol) The column scale factors for A. If DiagScale = COL or BOTH, A is multiplied on the right by diag(C). If DiagScale = NOEQUIL or ROW, C is not defined. If options->Fact = FACTORED or SamePattern_SameRowPerm, C is an input argument; otherwise, C is an output argument. B (input/output) float* (local) On entry, the right-hand side matrix of dimension (m_loc, nrhs), where, m_loc is the number of rows stored locally on my process and is defined in the data structure of matrix A. On exit, the solution matrix if info = 0; ldb (input) int (local) The leading dimension of matrix B. nrhs (input) int (global) The number of right-hand sides. If nrhs = 0, only LU decomposition is performed, the forward and back substitutions are skipped. grid (input) gridinfo_t* (global) The 2D process mesh. It contains the MPI communicator, the number of process rows (NPROW), the number of process columns (NPCOL), and my process rank. It is an input argument to all the parallel routines. Grid can be initialized by subroutine SUPERLU_GRIDINIT. See superlu_sdefs.h for the definition of 'gridinfo_t'. LUstruct (input/output) sLUstruct_t* The data structures to store the distributed L and U factors. It contains the following fields: o etree (int*) dimension (A->ncol) (global) Elimination tree of Pc*(A'+A)*Pc' or Pc*A'*A*Pc'. It is computed in sp_colorder() during the first factorization, and is reused in the subsequent factorizations of the matrices with the same nonzero pattern. On exit of sp_colorder(), the columns of A are permuted so that the etree is in a certain postorder. This postorder is reflected in ScalePermstruct->perm_c. NOTE: Etree is a vector of parent pointers for a forest whose vertices are the integers 0 to A->ncol-1; etree[root]==A->ncol. o Glu_persist (Glu_persist_t*) (global) Global data structure (xsup, supno) replicated on all processes, describing the supernode partition in the factored matrices L and U: xsup[s] is the leading column of the s-th supernode, supno[i] is the supernode number to which column i belongs. o Llu (sLocalLU_t*) (local) The distributed data structures to store L and U factors. See superlu_ddefs.h for the definition of 'dLocalLU_t'. SOLVEstruct (input/output) sSOLVEstruct_t* The data structure to hold the communication pattern used in the phases of triangular solution and iterative refinement. This pattern should be intialized only once for repeated solutions. If options->SolveInitialized = YES, it is an input argument. If options->SolveInitialized = NO and nrhs != 0, it is an output argument. See superlu_sdefs.h for the definition of 'sSOLVEstruct_t'. berr (output) float*, dimension (nrhs) (global) The componentwise relative backward error of each solution vector X(j) (i.e., the smallest relative change in any element of A or B that makes X(j) an exact solution). stat (output) SuperLUStat_t* Record the statistics on runtime and floating-point operation count. See util_dist.h for the definition of 'SuperLUStat_t'. info (output) int* = 0: successful exit < 0: if info = -i, the i-th argument had an illegal value > 0: if info = i, and i is <= A->ncol: U(i,i) is exactly zero. The factorization has been completed, but the factor U is exactly singular, so the solution could not be computed. > A->ncol: number of bytes allocated when memory allocation failure occurred, plus A->ncol. See superlu_sdefs.h for the definitions of varioous data types.
Macro Definition Documentation
◆ EPSILON
| #define EPSILON 1e-3 |
Function Documentation
◆ psgssvx3d()
| void psgssvx3d | ( | superlu_dist_options_t * | options, |
| SuperMatrix * | A, | ||
| sScalePermstruct_t * | ScalePermstruct, | ||
| float | B[], | ||
| int | ldb, | ||
| int | nrhs, | ||
| gridinfo3d_t * | grid3d, | ||
| sLUstruct_t * | LUstruct, | ||
| sSOLVEstruct_t * | SOLVEstruct, | ||
| float * | berr, | ||
| SuperLUStat_t * | stat, | ||
| int * | info | ||
| ) |
Here is the caller graph for this function:

◆ scheckArr()
|
static |
Here is the caller graph for this function:

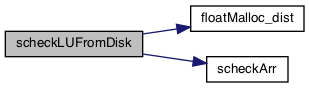
◆ scheckLUFromDisk()
| int scheckLUFromDisk | ( | int | nsupers, |
| int_t * | xsup, | ||
| sLUstruct_t * | LUstruct | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ sDumpLblocks3D()
| void sDumpLblocks3D | ( | int_t | nsupers, |
| gridinfo3d_t * | grid3d, | ||
| Glu_persist_t * | Glu_persist, | ||
| sLocalLU_t * | Llu | ||
| ) |
Dump the factored matrix L using matlab triple-let format.
◆ swriteLUtoDisk()
| int swriteLUtoDisk | ( | int | nsupers, |
| int_t * | xsup, | ||
| sLUstruct_t * | LUstruct | ||
| ) |
Here is the caller graph for this function:
